
Harmonics study for induction motors
Kehadiran harmonisa dalam pengoperasian motor induksi bisa sangat merugikan. Mengapa? Harmonik menghasilkan deformasi elastis, yaitu defleksi poros, torsi parasit, kebisingan getaran, pemanasan tambahan, dan menurunkan efisiensi mesin berputar.
Pergerakan harmonik searah atau berlawanan arah dengan fundamental. Kriteria rotasi maju atau mundur ditentukan dari h = 6m ± 1, di mana h adalah orde harmonik dan m adalah bilangan bulat apa pun.
Jika h = 6m ± 1, rotasinya searah maju, tetapi dengan kecepatan 1 ∕ h. Dengan demikian, harmonik ke-7, ke-13, ke-19, … berotasi searah dengan fundamental.
Jika h = 6m − 1, harmonik berotasi dalam arah yang berlawanan dengan harmonik fundamental. Dengan demikian, harmonik berotasi terbalik adalah ke-5, ke-11, ke-17, …. Harmonik orde 2, 5, 8, 11, 14, …. Harmonik orde negatif adalah harmonik orde 2, 5, 8, 11, 14, ….
Besarnya arus harmonik pada motor induksi tiga fasa dapat dihitung dari persamaan:
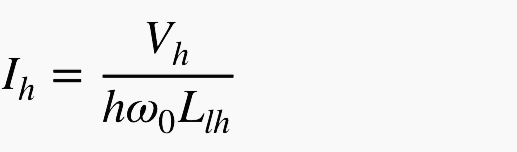
di mana:
- Ih adalah arus harmonik ke-h,
- Vh adalah tegangan harmonik ke-h, dan
- Llh adalah induktansi kebocoran stator dan rotor pada harmonik ke-h yang dirujuk ke stator.
Induktansi efektif cenderung menurun seiring dengan peningkatan h. Kira-kira Llh sama dengan L1 (reaktansi kebocoran stator), nilai minimum ketika induktansi batang internal diabaikan.
Dengan asumsi tertentu, rugi-rugi harmonik dapat didefinisikan sebagai:

- Ph is the harmonic loss,
- PRL is the loss at the rated point with sinusoidal supply,
- Ts is the starting torque,
- TR is the rated torque,
- SR is the slip, and
- E is the efficiency.
Pada motor NEMA kelas C, k dapat berkisar hingga 25 atau lebih tinggi. Indeks distorsi motor (MDI) didefinisikan sebagai:
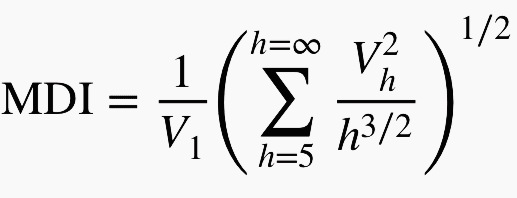
Penggunaan persamaan MDI di atas memungkinkan perbandingan yang mudah antara berbagai desain motor, tetapi tidak akan mengevaluasi pemanasan lokal. Rasio serupa hanya dapat diturunkan untuk pemanasan rotor. Motor dengan batang yang besar dan dalam atau sangkar ganda akan memiliki pemanasan harmonik tertinggi.
Dalam analisis terperinci, efek harmonisa pada rugi-rugi motor harus mempertimbangkan pembagian rugi-rugi menjadi rugi-rugi akibat tarikan dan gesekan, rugi-rugi tembaga stator, rugi-rugi inti, rugi-rugi tembaga rotor, dan rugi-rugi liar dalam inti dan konduktor serta efek harmonisa pada masing-masing komponen ini.
Induktansi kebocoran rotor dan stator efektif menurun dan resistansi meningkat seiring dengan frekuensi. Efek arus urutan negatif akan lebih terasa pada frekuensi yang lebih tinggi. Resistansi rotor dapat meningkat empat hingga enam kali lipat nilai DC, sementara reaktansi kebocoran dapat berkurang hingga sepersekian dari nilai frekuensi dasar.
Rugi tembaga stator meningkat sebanding dengan kuadrat arus harmonik total, ditambah peningkatan tambahan akibat efek kulit pada resistansi pada frekuensi yang lebih tinggi.
Harmonik berkontribusi terhadap saturasi magnetik, dan pengaruh tegangan terdistorsi terhadap rugi-rugi inti tidak dapat diabaikan. Komponen rugi-rugi utama yang dipengaruhi oleh harmonisa adalah rugi-rugi tembaga stator dan rotor, serta rugi-rugi stray.
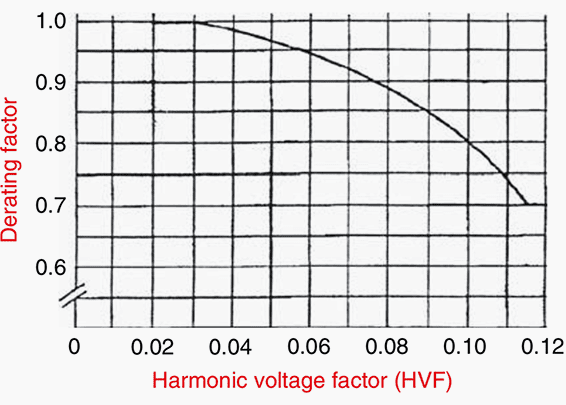
Faktor harmonik sebesar 11% memberikan penurunan sekitar 25% pada penggunaan motor secara umum
Gambar 1 dari NEMA (Asosiasi Produsen Amerika Utara) menunjukkan faktor penurunan peringkat berkenaan dengan faktor tegangan harmonik, yang merupakan nama lain untuk faktor distorsi tegangan.
Penurunan Torsi
Ketika motor dioperasikan di bawah kecepatan terukur, penurunan torsi terjadi karena pendinginan yang berkurang, dan NEMA menyediakan kurva penurunan tersebut. Dalam operasi inverter, torsi berkurang karena kenaikan suhu tambahan akibat rugi-rugi harmonik dan juga karena karakteristik tegangan-frekuensi beberapa inverter.
Metode yang disukai adalah menguji sampel representatif dari desain motor di bawah beban sambil beroperasi dari prototipe representatif desain inverter dan mengukur kenaikan suhu belitan.
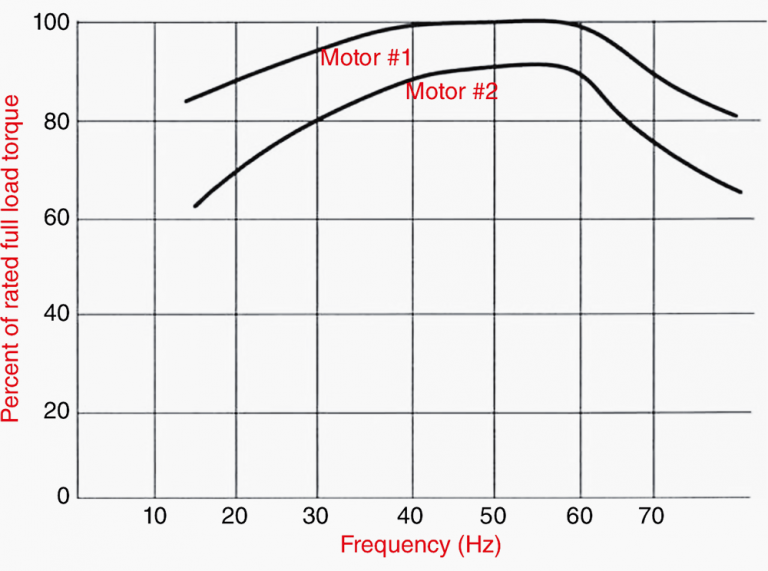
Gambar 2 direproduksi dari NEMA. Untuk operasi di atas 90 Hz pada tingkat daya kuda yang dibutuhkan, mungkin perlu menggunakan motor dengan rating 60 Hz yang lebih tinggi. Motor dengan faktor layanan 1,15 merupakan pilihan yang lebih baik.
Kurva penurunan daya pada Gambar 2 tidak spesifik; terdapat dua kurva yang diberi label “desain #1” dan “desain #2”. Hal ini menunjukkan bahwa penurunan daya torsi dalam kondisi operasi yang sama ditentukan oleh desain motor.
Medan Berdenyut dan Tekanan Dinamis
Pada mesin sinkron, frekuensi yang diinduksi pada rotor merupakan selisih rotasi bersih antara frekuensi fundamental dan frekuensi harmonik. Harmonik kelima berputar terbalik terhadap stator, dan terhadap rotor, frekuensi yang diinduksi adalah frekuensi harmonik keenam.
Demikian pula, harmonik ketujuh yang berputar maju terhadap stator menghasilkan harmonik keenam pada rotor. Interaksi medan-medan ini menghasilkan torsi berdenyut pada 360 Hz dan mengakibatkan osilasi poros. Demikian pula, pasangan harmonik 11 dan 13 menghasilkan harmonik rotor ke-12.
The same phenomena occur in induction motors.
Dengan mempertimbangkan slip motor induksi, harmonik urutan positif, h = 1, 4, 7, 10, 13, …, menghasilkan torsi (h − 1 + s)? pada arah putaran, dan harmonik urutan negatif, h = 2, 5, 8, 11, 14, …, menghasilkan torsi −(h + 1 − s)? yang berlawanan arah putaran. Di sini, s adalah slip motor induksi.
Torsi harmonik mungkin meningkat karena kombinasi slot stator dan rotor tertentu, dan rotor sangkar lebih rentan terhadap sirkulasi arus harmonik dibandingkan dengan rotor lilitan.
Harmonik urutan nol (h = 3, 6, …) tidak menghasilkan kerapatan fluks bersih. Hal ini menghasilkan rugi-rugi ohmik. Semua medan parasit menghasilkan derau dan getaran. Fluks harmonik yang tumpang tindih pada fluks utama dapat menyebabkan saturasi gigi, dan kebocoran zigzag dapat menghasilkan tarikan magnet yang tidak seimbang, yang bergerak di sekitar rotor.
Hasilnya, poros rotor dapat membelok dan berjalan melalui kecepatan resonansi kritis yang memperkuat denyut torsi.
Riak torsi dapat terjadi pada berbagai frekuensi. Jika inverter berjenis enam pulsa, maka riak torsi harmonik keenam akan terbentuk, yang akan bervariasi antara 36 hingga 360 Hz, ketika motor dioperasikan pada rentang frekuensi 6–60 Hz. Pada kecepatan rendah, riak torsi tersebut dapat terlihat sebagai osilasi kecepatan poros yang dapat diamati atau sebagai pulsasi torsi dan kecepatan, yang biasanya disebut cogging.
Ada kemungkinan juga bahwa beberapa kecepatan dalam rentang operasi tersebut mungkin sesuai dengan frekuensi mekanis alami beban atau struktur pendukung. Pada frekuensi tersebut, amplifikasi dapat terjadi, sehingga menimbulkan tegangan dinamis yang besar.
Pengoperasian selain yang sesaat, yaitu saat menyalakan, harus dihindari pada kecepatan ini.
Torsi osilasi pada generator sinkron dapat mensimulasikan generator turbin ke dalam mode getaran kopling kompleks yang menghasilkan osilasi torsional elemen rotor dan pelenturan bucket turbin. Jika frekuensi harmonik bertepatan dengan frekuensi torsional generator turbin, osilasi rotor dapat memperkuatnya.
Sebuah loop kontrol dalam unit SVC di pabrik baja terdekat menghasilkan modulasi bentuk gelombang 60 Hz. Hal ini menciptakan pita samping atas dan bawah, menghasilkan komponen arus 55 dan 65 Hz. Rotasi fase terbalik terwujud sebagai frekuensi stimulasi 115 Hz pada rotor, yang bergerak antara 114 dan 118 Hz.
Hal ini membangkitkan frekuensi alami mode keenam dari poros rotor, sehingga menciptakan tegangan torsi yang besar.
KONTEN PREMIUM
Artikel-artikel teknis dalam kategori “Konten Premium” hanya dapat diakses sepenuhnya oleh Anggota Premium. Panduan teknik elektro, artikel teknis spesialis, dan makalah yang ditulis oleh insinyur listrik berpengalaman di beberapa negara semuanya tersedia untuk pengguna premium. Sebagai seorang insinyur listrik yang bekerja di bidang Tegangan Rendah, Menengah, atau Tinggi, ini akan membantu Anda mengembangkan keterampilan teknis profesional yang Anda butuhkan di tempat kerja.




